HIPPIE- Autonomous Robots Using Machine Learning and Swarm Intelligence
Bijayan Bhattarai,Santosh Dahal, Siddhant Baral
Students from Electronics 072 batch of Institute of Engineering
Paschimanchal Campus, Pokhara
6th March 2019
ABSTRACT
Artificial Intelligence, Machine Learning and Deep Learning has been around for a while. Everyone is fascinated by them. In fact, hypotheses quoting them as The Future has drawn everyones interest. Scientists, Researchers, Educators, Students and even the general public are curious about them and their prospects. We, however, are interested in their application in Robotics. Inspired by Duckietown project (www.duckietown.org) from MIT, we propose HIPPIE, THE FIRANTE. Hippie was a counterculture youth movement that rejected the mores of mainstream American life in the 1960s. Project HIPPIE is an automated town that is dedicated to help hippies to reach different places in the town in hippie-bots. Hippie-bots are Computer Vision powered self-driving robots designed to be able to Machine Learning. Hippie bots can also collaborate and work together resulting in Swarm Robotics. HIPPIE will be developed with the primary objective to learn and to assess the possibilities of low- cost framework for modern Robotics in Nepal.
OBJECTIVES
- To evaluate the state of the art of machine learning and artificial intelligence on a physically embodied platform.
- To develop swarm intelligence.
- To prepare artificial intelligent robotics module.
TASK SUBDIVISION
1. Base Hippiebot
- 3-wheel robot with AVR Atmega32 microcontroller controlled from PC.
- Mathematical analysis of Robot.
- Making the MAP of Hippietown.
Fig 1. M-bot.
2. Semi-Intelligent Hippiebots
- Interfacing ultrasonic senor with microcontroller and detecting obstacle.
- Implementing Computer vision using pi camera and pi module to pull relevant information from an image or sets of images.
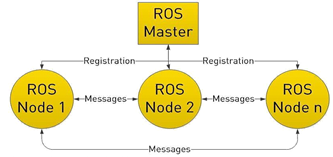
Fig. 2 Connected Node with master node.
3. Machine Learning
- Design of learning algorithms, as well as scaling existing algorithms, for path planning and safe driving.
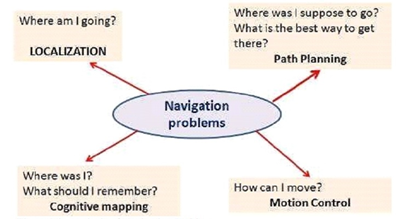
Fig. 4 Analysis of Navigation Problem.
4. Swarm Intelligence
- Navigation plus vehicles controlled by the matrix.
- Models and algorithms to help develop autonomous systems that can work collaboratively with other systems and with humans.
5. Artificial Intelligent Bot
- Model composed of inputs such as image or audio and several hidden layers of sub-models that serve to perform given task.
REFERENCES
- Z. Zhou, G. R. Arce and G. Di Crescenzi, A Byte of Python, IEEE Trans. Image Process., vol. 15, no. 8, pp.2441-2453, 2006.
- Jiawei Han, Data Mining, Concept and Technique, vol. 36, is. 7, pp. 1619– 1629, 2003.
- https://www.bcg.com/en-au/publications/2015/lean-manufacturing-innovation-robotics-revolution-next-great-leap-manufacturing.aspx [Accessed 7 Jan. 2019].
- https://www.weforum.org/agenda/2018/07/robots-robots-everywhere-what-does-it-mean-for-developing-countries [Accessed 7 Jan. 2019].
- Duckietown.org. (2019). Duckietown – A playful way to learn robotics. [online] Available at: https://www.duckietown.org [Accessed 7 Jan. 2019].
- Google Developers. (2019). First Steps with TensorFlow: Toolkit | Machine Learning Crash Course | Google Developers. [online] Available at: https://developers.google.com/machine-learning/crash-course/first-steps-with-tensorflow/toolkit [Accessed 7 Jan. 2019].
SUPERVISORS
Hari Prasad Baral (From IOE,WRC)
Danda Pani Paudel (From NAAMII)
Suman Raj Bista ((From NAAMII)